Ou bien : « C’était écrit, nous ne pouvions pas gagner… »
par Thierry Bastian
Samedi 17 mars s’est déroulée la seconde coupe de robotique Lego d’Afrique de l’est, la First Lego League, à Brookhouse, Nairobi.

Pourquoi « Allo Houston » ? Tout simplement parce que la meilleure équipe du tournoi de cette compétition était qualifiée pour la grande finale à Houston le mois prochain.
Mais revenons à nos moutons ! Ou plutôt à nos robots.
Comme l’année dernière, nous avions inscrits deux équipes. 20 autres équipes étaient présentes, la plupart du Kenya et certaines d’Ouganda. Toutes les grandes écoles de Nairobi étaient présentes, et la french school a fait grande impression avec son magnifique stand ‘bleu blanc rouge’ où trônaient fièrement des baguettes de pain et des croissants.

Cette compétition est organisée dans de nombreux de pays sous le même modèle : Chaque équipe dispose de 2mn30 pour réaliser un maximum de missions sur une piste constituée de décors en Lego.
 Dès que le robot est parti, il doit se débrouiller seul, et il est possible de réaliser 18 missions au total. Le décor change chaque année, et en parallèle, chaque équipe doit préparer :
Dès que le robot est parti, il doit se débrouiller seul, et il est possible de réaliser 18 missions au total. Le décor change chaque année, et en parallèle, chaque équipe doit préparer :
– un projet sur un thème écologique (cette année sur l’eau)
– un poster sur les valeurs d’esprit d’équipe, d’entraide, etc… (appelées ‘core values’)
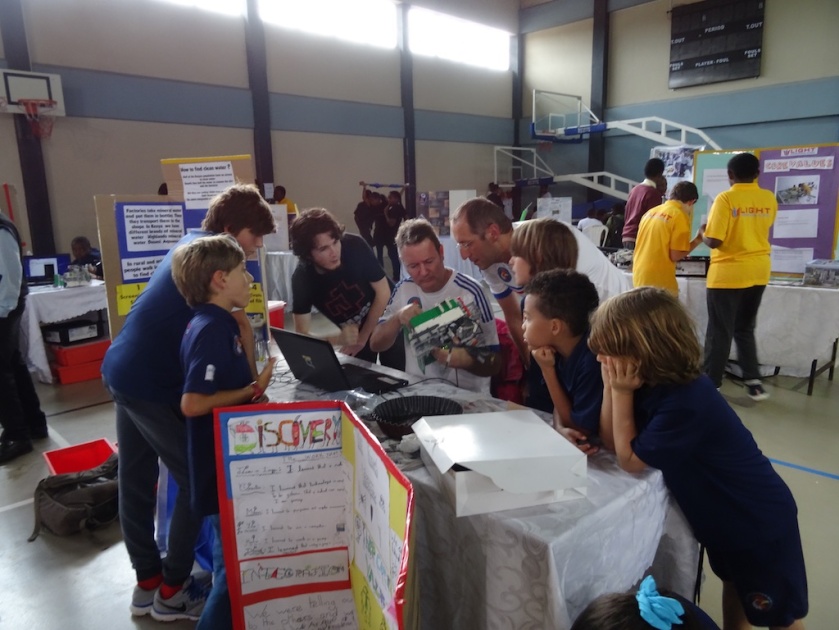
Nos élèves ont ainsi eu trois entretiens devant des jurys avant d’attaquer les choses sérieuses : la présentation de leur robot, leur projet sur l’eau et les ‘core values’ .

Nos équipes étaient chacune composées de 6 élèves qui étaient les plus jeunes de la compétition, les élèves des autres équipes ayant plutôt entre 14 et 18 ans.

L’équipe ‘French troopers’ réunissait Corentin – Danaé – Jean-Loup – Léo – Manec – Marco, tous élèves de CM1 et tous débutants.
L’équipe ‘French baguettes’ était composée de Arno – Basile – Jules-Iann – Mahefa – Namahi – Talaan, élèves de CM2 à la troisième, un peu plus expérimentés.
Dire que la réalisation des missions est compliquée est un faible mot ! Si une ou deux missions sont simples, les autres s’avèrent vraiment ardues à mener à bien, la principale difficulté résidant dans la construction du robot lui même.
Chaque robot peut embarquer 4 moteurs et 4 capteurs au maximum. Les capteurs, ce sont des petits accessoires qui permettent au robot de détecter l’environnement qui l’entoure : la présence d’un obstacle en face de lui, la couleur du sol, le contact avec un objet, un son, une distance parcourue ou la mesure d’un angle de rotation.

Pour s’entraîner, nos élèves ont bénéficié de 4 heures par semaine pendant 6 semaines, plus une journée ‘marathon’ de 7 heures, soit une trentaine d’heures au total, ce qui était bien plus que l’année dernière. Dans certaines écoles, les élèves avaient bénéficié de deux semaines à temps plein pour se préparer, ce qui n’est pas très égalitaire, et par ailleurs, tout le travail se réalisant en amont dans l’école, il est assez difficile de savoir qui, des élèves ou des coachs, a réalisé la plus grande part du travail. Il est clair qu’avec Mr Merendet, nous avons beaucoup plus aidé l’équipe des débutants que celle des élèves expérimentés.
En ce sens, la coupe de robots Lego inter lycées français qui était auparavant organisée était plus équitable, les élèves découvraient les missions le jour de la compétition et devaient les mener à bien en partant de zéro, dans un temps imparti. Ils ne pouvaient recevoir aucune aide extérieure.
Robots Lego est une activité chronophage qui nécessite un fort investissement personnel, de la rigueur et surtout de la pugnacité (Mahefa et Namahi qui sont restés la veille du tournoi jusqu’à 18 heures pour tester et modifier un nombre incalculable de fois le programme du robot ne diront pas le contraire !). Si les élèves débutants ont participé à quasiment toutes les séances de robots Lego, cela a été un peu plus compliqué pour réunir tous les élèves de l’autre équipe. L’an prochain nous ne sélectionnerons que des élèves pleinement disponibles et donc qui n’enchaînent pas les activités pêche à la ligne, yoga, water-polo, scoubidou et pétanque 😉
Après leurs entretiens du matin et une séance d’entraînement, les 22 équipes se sont donc toutes retrouvées dans l’arène pour 3 manches de 2mn30 chacune.

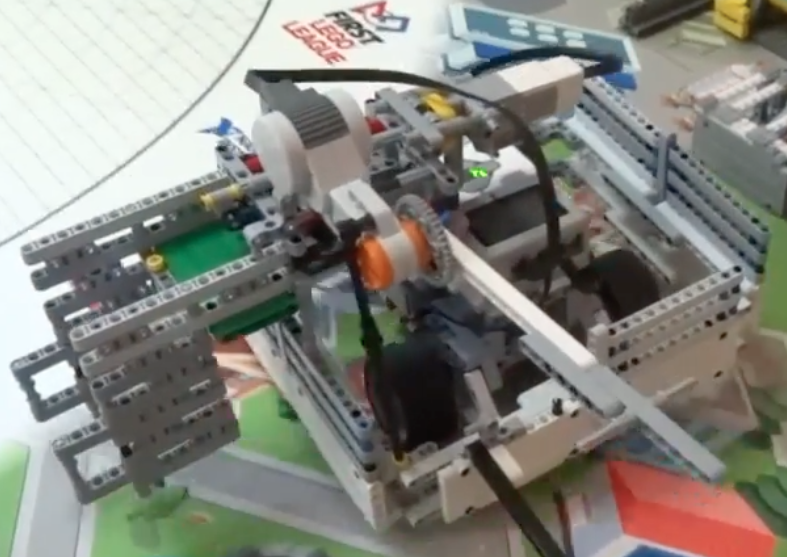
Par rapport à l’an dernier, nos robots ont beaucoup évolué et faisaient partie des plus beaux de la compétition. La plupart des équipes avaient des robots assez basiques. De notre côté, nous étions partis sur des robots massifs, assez gros, capables de supporter des moteurs supplémentaires et des systèmes à engrenages.
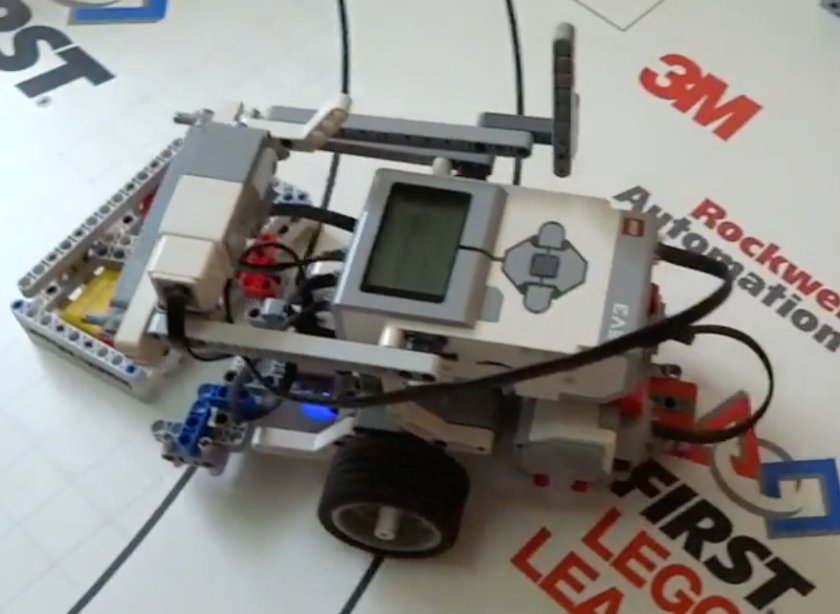
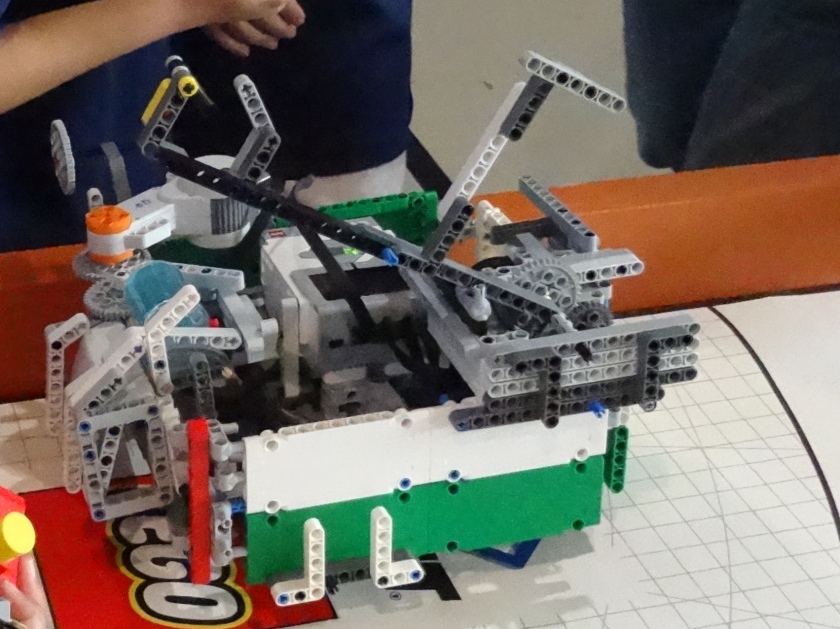
La grande difficulté pour les élèves est de réussir à construire des mécanismes et à réaliser des assemblages solides et surtout qui ne bougent pas quand on manipule le robot. C’est ce qui a le plus manqué à l’équipe expérimentée, avec leur robot un peu trop ‘branlant’.
Et puis… De la rigueur, de la rigueur et de la rigueur ! 😉
Ce sont les french troopers qui ont ouvert le bal. Durant la manche, seuls 2 élèves sont autorisés à manipuler le robot, Jean-Loup et Léo avaient cette délicate mission, et beaucoup de pression sur les épaules (enfin… je crois que c’est Sylvain Merendet et moi même qui avions le plus le trac en fait…).

Nous avions prévu de réaliser 6 missions (sur les 18), ce qui était un objectif honnête avec un maximum de 120 points réalisables (retenez-bien ce chiffre, il est important !)
Catastrophe, au premier lancement, le robot refuse de rouler droit, et le round se termine sur un score de 75 points.

Les grands ont plus de mal, leur robot ‘branlant’ ne roule pas plus droit que l’autre, dans la panique et la confusion ils modifient les programmes pour essayer de compenser. Namahi et Mahefa lancent le robot et au bout de 2mn30, ils marquent 15 petits points.
Leur objectif était de réussir 4 missions, pour un score maxi de 80 points. La veille, tout fonctionnait, mais le robot a mal supporté le voyage et les manipulations un peu… viriles de l’équipe.

D’un coin de l’oeil nous observons les autres équipes : Elles rencontrent toutes des problèmes. ISK, les vainqueurs de l’an dernier ont un superbe robot mais enchaînent les échecs. A l’issue du premier round, le meilleur score est de 95 points, les ‘French troopers’ sont à la seconde place.
Le second round se déroule plus ou moins comme le premier, ces maudits robots refusent toujours de rouler droit.
Nous finissons par trouver la cause : les capteurs angulaires sont défaillants : nous utilisons ces capteurs pour justement que les robots roulent droit. Le système est assez simple, le capteur mesure l’angle du robot et dès qu’il dévie un peu, il est remis sur le droit chemin. Seulement, de temps en temps, ces capteurs renvoient des valeurs aléatoires et le robot part de travers.
Juste avant la troisième et dernière manche, nous réglons ce problème en réinitialisant plusieurs fois le capteur et surtout en modifiant le port sur lequel il est branché (il était branché sur la prise n°1 du robot, nous le branchons sur la prise n°2). Nous laissons le robot branché sur le PC jusqu’à la dernière minute pour vérifier que le capteur fonctionne correctement et le moment fatidique arrive enfin : Les élèves lancent le programme qui n’avait jamais fonctionné correctement, et celui-ci fonctionne parfaitement, comme à l’école : Et hop, 60 points de gagnés. L’autre programme ayant toujours fonctionné, nous pouvons faire un super score en marquant 60 points de plus. Les élèves lancent le second programme, le robot part, et il s’arrête après 30 cm. What ???? Ils recommencent, pareil, le robot s’arrête. L’heure tourne, que faire ? Panique au bord de la piste… L’heure tourne toujours… Et soudain… Nous trouvons : Le changement de prise du capteur !!! Dans la précipitation, nous avons modifié le numéro de prise où est branché le capteur sur un programme, mais nous avons oublié de le faire sur l’autre. Quand nous trouvons la solution (rebrancher le capteur sur la prise n°1 pour l’autre programme), il ne reste que 10 secondes, c’est trop tard, c’est fini.

L’équipe qui remporte le tournoi a marqué 115 points. 60 points + 60 points = 120 points, nous pouvions gagner… Houston, adieu 😦
La déception est forte (surtout pour moi qui suis responsable de la boulette, je n’ai pas fini de me faire chambrer par Mr Merendet).
Dans l’équipe des grands, les élèves remettent le programme de la veille et réussissent à marquer 40 points. Ca va mieux !

Au final, nos équipes terminent à la 5ème et à la 19ème place, ce qui est une excellente performance !
Les vainqueurs de l’an dernier finissent à la 14ème place, leur robot hyper (trop ?) sophistiqué n’a jamais fonctionné correctement sur la piste de Brookhouse. Néanmoins, nous avons trouvé quelques bonnes idées dans leur conception, pourquoi pas pour l’année prochaine ?
Quel bilan peut-on tirer de ce tournoi ?
Tout d’abord, un grand bravo pour l’excellente implication de tous les élèves le jour J, leur patience car l’organisation était quand même perfectible avec beaucoup de temps morts.
S’ils n’ont pas gagné la coupe de la meilleure présentation, les jurys ont été impressionnés par leurs prestations.
Merci aux parents venus soutenir les équipes, la french school a été remarquée !

Avis de candidature : Pour l’an prochain, nous cherchons des élèves motivés, ayant du temps libre, et ayant des notions de programmation informatique (nous aimerions beaucoup avoir aussi des lycéens).
Merci de me contacter 🙂


BRAVO à tous vous nous avez fait honneur!!!!!!
J’aimeJ’aime
Bravo et merci à vous, Thierry et Sylvain, pour avoir encadré nos « ingénieurs en herbe » !
J’aimeJ’aime